





 |
 |
 |
 |
| Spannweite: | 3340mm (Massstab 1:x,x) |
| Länge: | 1900mm |
| Flächeninhalt: | 68 dm2 |
| Profil: | DirkPflug0815 |
| Gewicht: | 8230g mit BEC / 8437g mit 2x 2S2600mAh Stützakku / (mit Ballast (Alu-Verbinder) bis xxxxg) |
| Flächenbelastung: | 121g/dm2 / 124g/dm2 ( mit Ballast bis xxxg/dm2 ) |
| Empfänger: | Jeti Rex10 Assist |
| Empfängerakku: | 2x2S2600mAh Jeti PowerIon |
| Antrieb: | Torcman NT530-28/14Pol/9W - Regler YGE Spahir125A - Propeller GM 16x10 - 2x4s4500 Fullymax 45C |
| Servo: | Querruder: | KST BLS915 ((25kg/cm, 0.07s60°@8.4V) |
| Wölbklappen: | KST BLS915 (25kg/cm, 0.07s60°@8.4V) | |
| Seitenruder und Höhenruder: | KST BLS915 (25kg/cm, 0.07s60°@8.4V) |
Inspiration:
Nachdem ich im Frühling 2022 den kleine PS-Swift 2.8m eingeflogen habe, konnte ich ihn erstmals im Mai 2022 so richtig am Monte Lema laufen lassen. Die Begeisterung war gross und ich hörte und lass zuvor auch schon vom grossen Bruder, dem PS-Swift 3.34m. In der Beschreibung von PS-Models gab es Aussagen, welche mich reizten. Vorallem: "Abfluggewicht ist ab 7kg mit dem Leopard-Direktantrieb (6S-Akku) möglich. Mit dem starken Torcman-Antrieb, welcher mit 8S-Akkus betrieben wird, ist ein Abfluggewicht ab 7,5kg realistisch. Handstarts sind mit FES-Antrieb auch in der Ebene absolut kein Problem." Wenn man alleine am Hang steht, ohne viel Wind, aber draussen die Thermik strak ist, wäre dies ideal. Ich war mir aber auch bewusst, dass dies auch eine Sache der Routine ist, ein solches Modell selber zu starten. Videos auf der Ceflix Homepage sahen jedoch locker aus: http://www.ceflix.de/Swift-S1-3.34m.html
Obwohl der Qantas Swift in meinem Hangar steht und man nicht sehr oft die Möglichkeit hat, solche Modelle artgerecht zu fliegen und ich meine dabei nicht mit Antrieb auf dem Modellflugplatz, bestellte ich ein PS-Swift 3.34. Die angegebene Lieferfrist war ca. 15 Monaten, was jedoch somit nicht für die Saison 2023 reichen wird, um Flugbereit zu sein.
Lieferung:
Produziert wird der Swift 3.34 erneut bei CARF, wie auch schon der kleine PS-Swift 2.8. Die Lieferung war mit Frühjahr/Sommer 2023 datiert und ich erhielt das Paket bereits im April 2023. Auspacken ist immer sehr interessant! Sehr gut geschützt waren alle Teile noch zusätzlich fixiert. Die Flügel machen einen sehr stabilen Eindruck, wobei das Gewicht auch ordentlich ist mit ca 1'400g (Gleich schwer wie der Qantas Swift 3.2m). Die Ruderhörner sind bereits eingeharzt, was sehr erfreulich ist. Diesmal sogar in korrektem Winkel zur Scharnierlinie, was ich beim kleine PS-Swift 2.8 bemängelt habe.
Der Vergleich zum Qantas Swift ist eigentlich nicht ganz passend, da der PS-Swift 3.34 doch etwas grösser ist.
| Swift 3.34m PS Models | Swift Qantas 3.2m | |
| linker Flügel | 1437g | 1403g |
| rechter Flügel | 1410g | 1351g |
| Rumpf mit SLW und Haube | 1932g | 1503g |
| Höhenleitwerk | 298g | 258g |
| Verbinder | 348g | 296g |
| Total Leergewicht | 5425g | 4811g |
Die Ruder sind sehr sauber ausgetrennt und die Oberfläche und das Design sehr schön lackiert, wohl fast noch etwas perfekter als beim kleinen PS-Swift. Das HLW ist in gleicher Qualität und macht auch einen sehr stabilen Eindruck, der Dorn für die Anlenkung ist ebenfalls bereits eingeharzt, ein weiterer Arbeitsschritt, welcher somit schon erledigt ist. Das SLW wirkt sehr leicht und auch hier ist das Ruderhorn bereits montiert und das SLW zusätzlich bereits am Rumpf montiert. Die Durchführungen für die Seilzuganlenkung am SLW muss noch gemacht werden. Der Rumpf ist sehr schön und sein Naht ist lackiert und kaum zu sehen. Die Kabinenhaube ist sehr schön aufgezogen und die Befestigung einwandfrei gelöst. Insgesamt macht der grosse PS-Swift einen sehr guten Eindruck, mit sehr hohem Fertigungsgrad. Das Zubehör ist komplet und hochwertig, Seilzug für das SLW, Schubstange für die Anlenkung des HLW und die Anlenkung für die Flügelklappen komplementieren es. Das Servobrett ist fertig gefräst und beschichtet. Die Beschichtung von diesem ist erneut eher etwas holperig. Die Bauanleitung mit Bilder, Ruderausschlägen und Schwerpunkt ist identisch wie beim kleinen PS-Swift und liefert die nötigen Daten.
Bau (Winter 2023 - Frühling 2024 ):
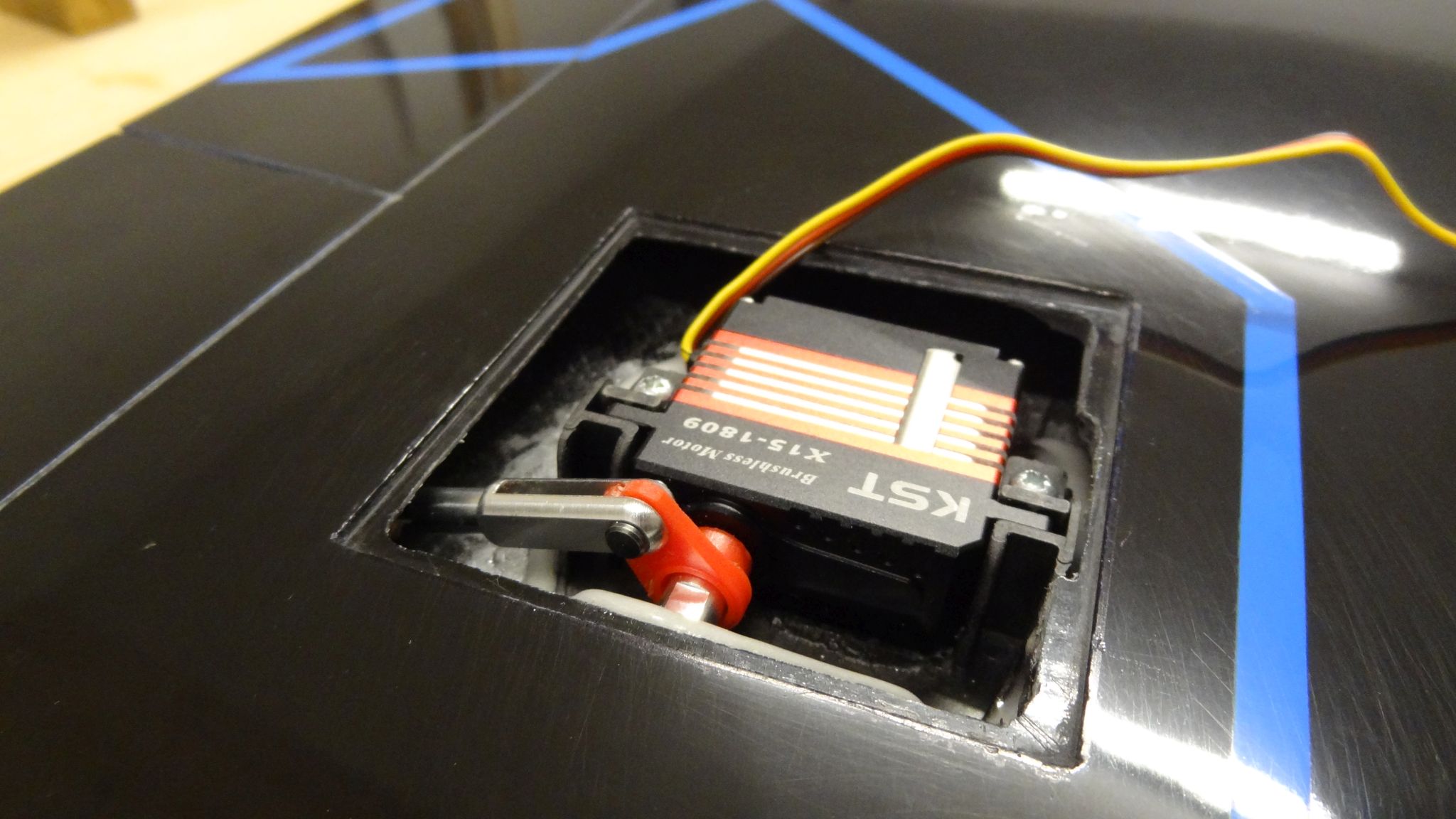
Ich begann mit dem Servo Einbau in den Flügel. Als Querruder Servo kommt wie von PS-Models empfohlen das KST X15-1809 zum Einsatz mit einem Servorahmen von Servorahmen.de mit Gegenlager. Bei den Gabelköpfen habe ich mich für die MP-Jet Version mit Bolzen entschieden. Mit ein paar Feilenstössen erweiterte ich den Schlitz der Gabelköpfe von 2mm auf 2.2mm damit sie zu den bereits eingeharzten Ruderhörner, welche aus ca. 2.2mm CFK bestehen, passen. PS-Models gibt relativ grosse Ausschläge an. Damit der erforderliche Ausschlag nach oben erreicht werden konnte, musste ich am Gabelkopf für die Servoachse etwas ausfräsen. Das Resultat der ersten Anlenkung war erfreulich, die KST X15-1809 Servo sind sehr schnell und spielfrei.
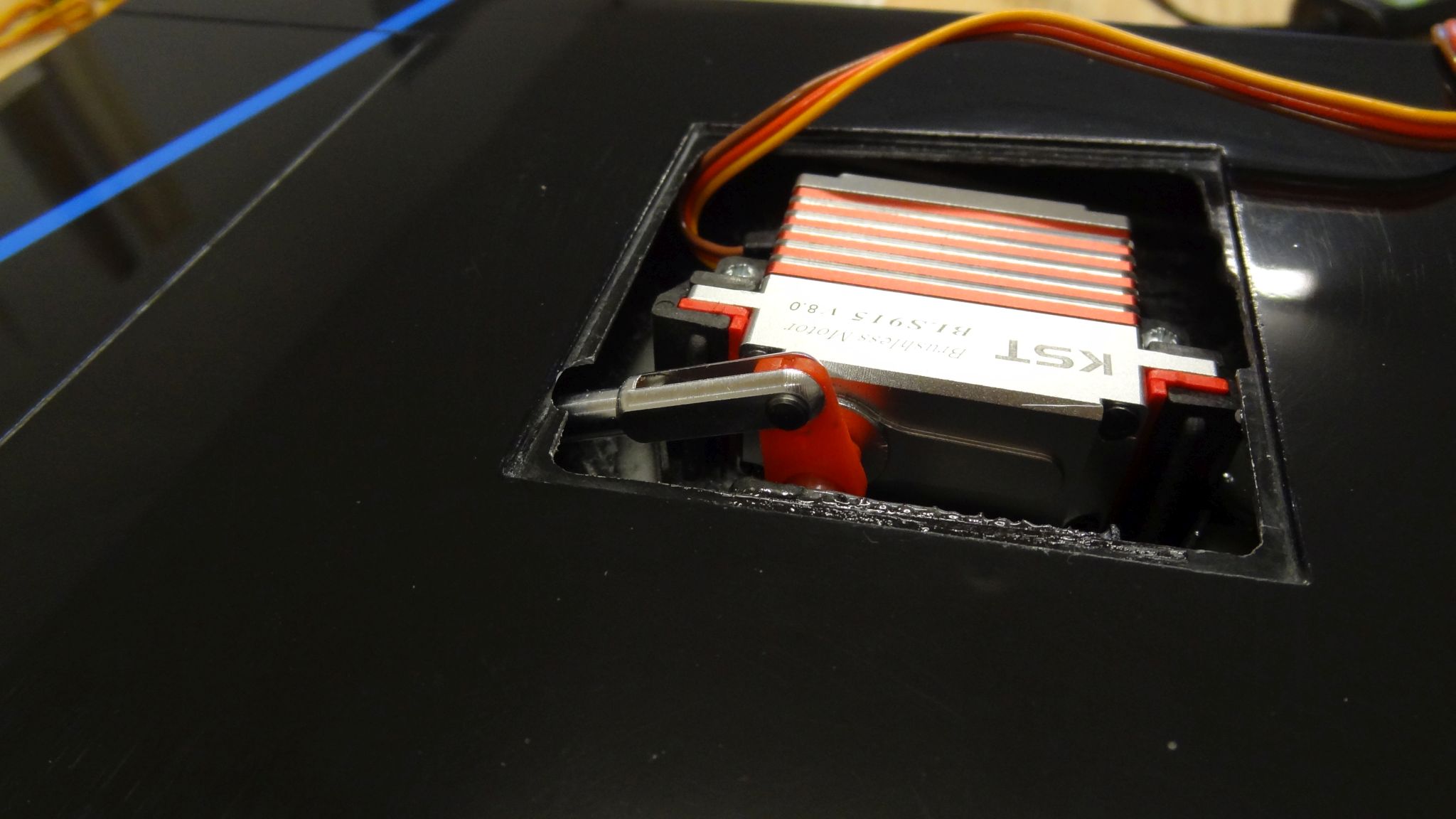
Als Wölbklappen Servo kommt wie von PS-Models empfohlen das KST BLS915 zum Einsatz in einem Servorahmen von Servorahmen.de mit Gegenlager, die KST BLS915 sind sehr schnell, aber ich habe das Gefühl etwas weniger spielfrei. Die Hutzen der Servoabdeckungen sind für die M3 MP-Jet Gabelköpfe etwas schmal, da musste mit dem Dremel noch etwas erweitert werden.
 |
 |
 |
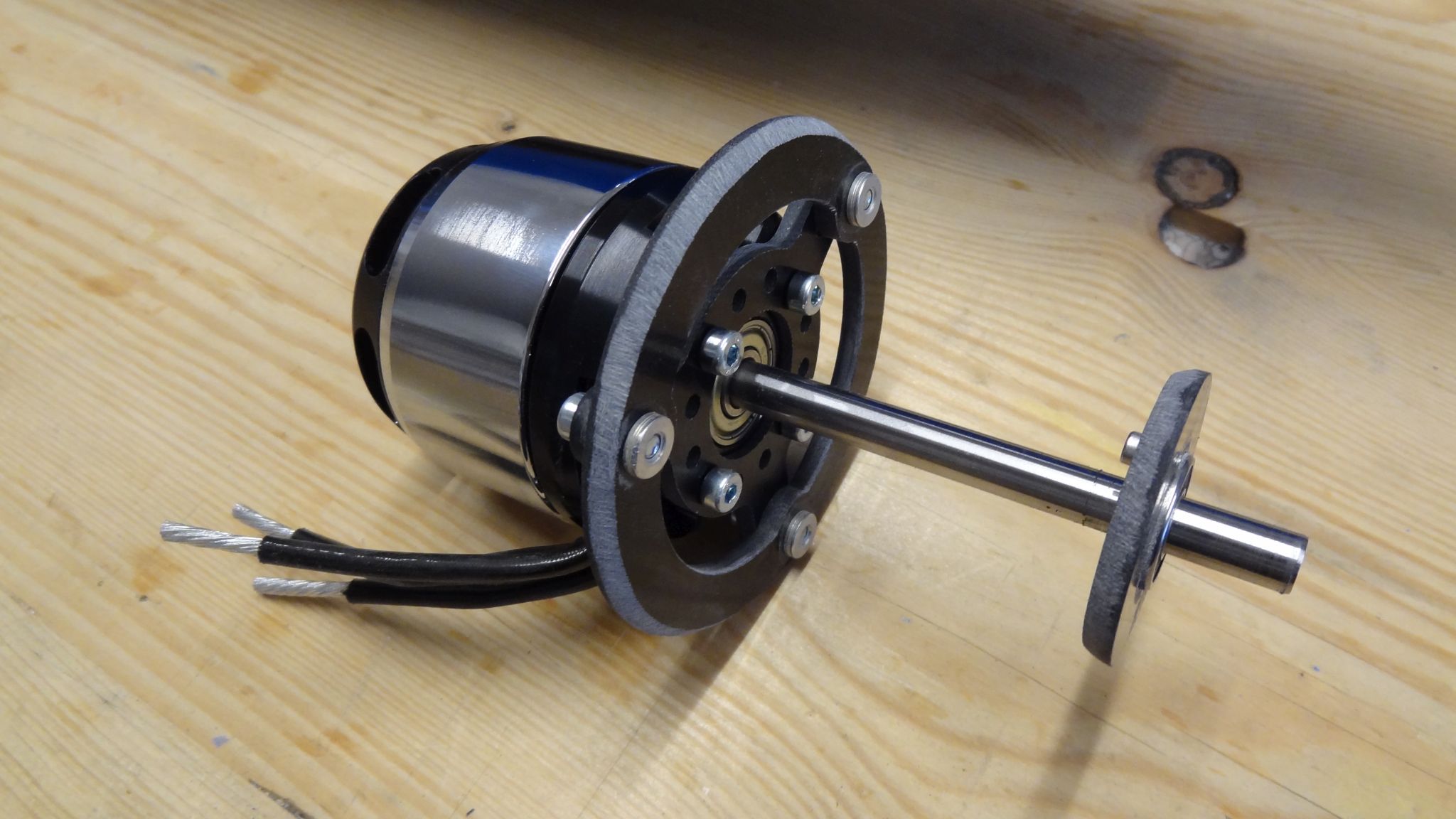
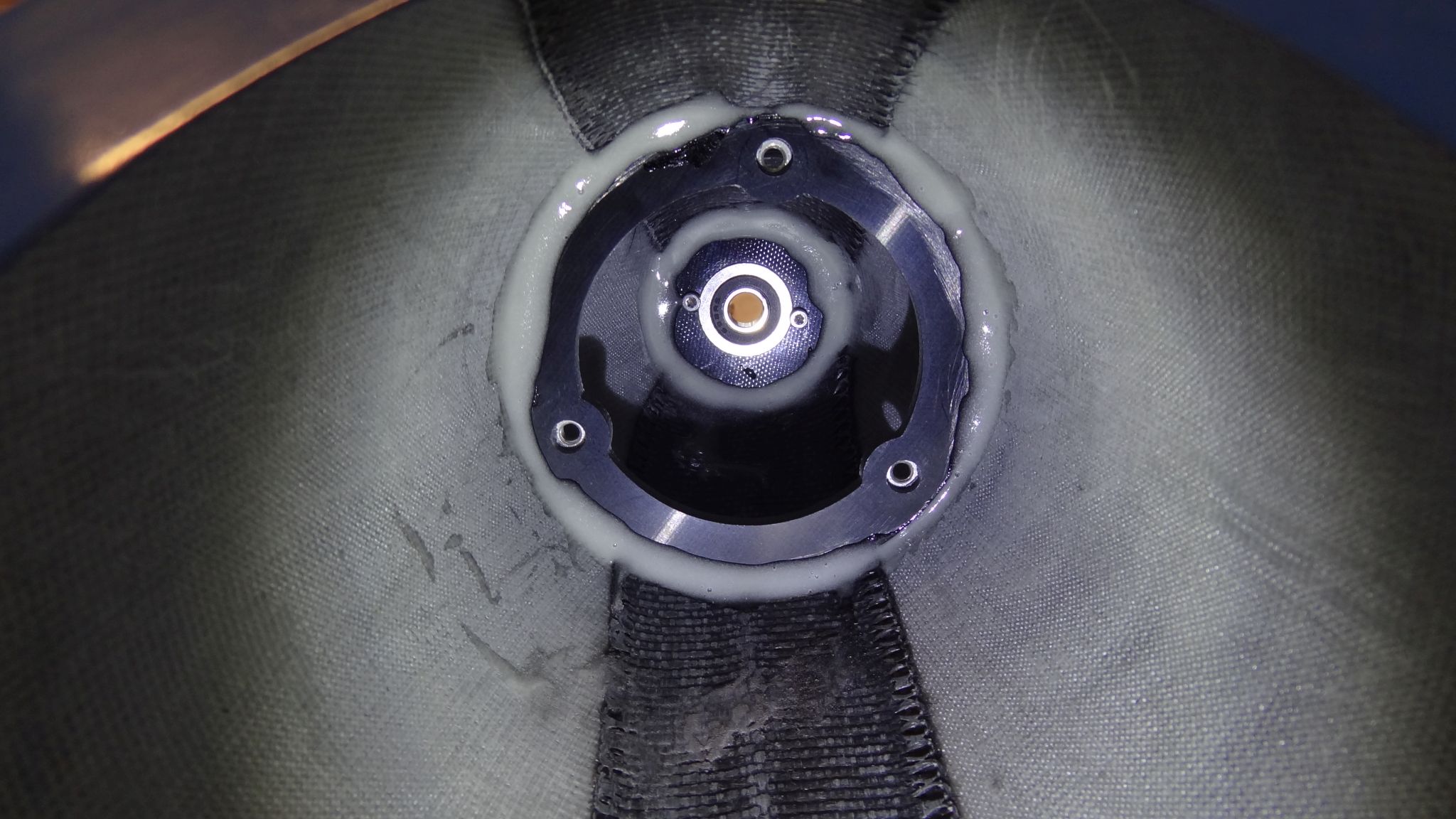
Der Motoreinbau mit dem Ringspant, dem Y-Adapter und dem Spant mit Kugellager war neu für mich. Mit einer Schablone hab ich mit Untermass die Rumpfnase abgetrennt und den Motor mit dem Y-Adpater und dem Ringspant und dem Kugellagerspant in den Rumpf gedrückt. Damit der Spant mit dem Kugellager nicht nach hinten gedrückt wird, hab ich ein Stück Rohr über die Welle gestülpt. Nach dem Einharzen des Ringspant und des Spant mit Kugellager, passt ich anschliessend den Spinner der Rumpfform an. Der in passender Farbe lackierte Spinner und Propeller von PS-Models ersparte viel Zeit. So muss nicht die passende Farbe gesucht werden, welche man sowieso nie findet.
Neu verbaute ich erstmals die Porpellerpositionierung von YGE und fertigte dazu einen SPant an, welche ich an das Heck des Torcman Motor schraubte.
 |
 |
 |
 |
 |
 |
 |
 |
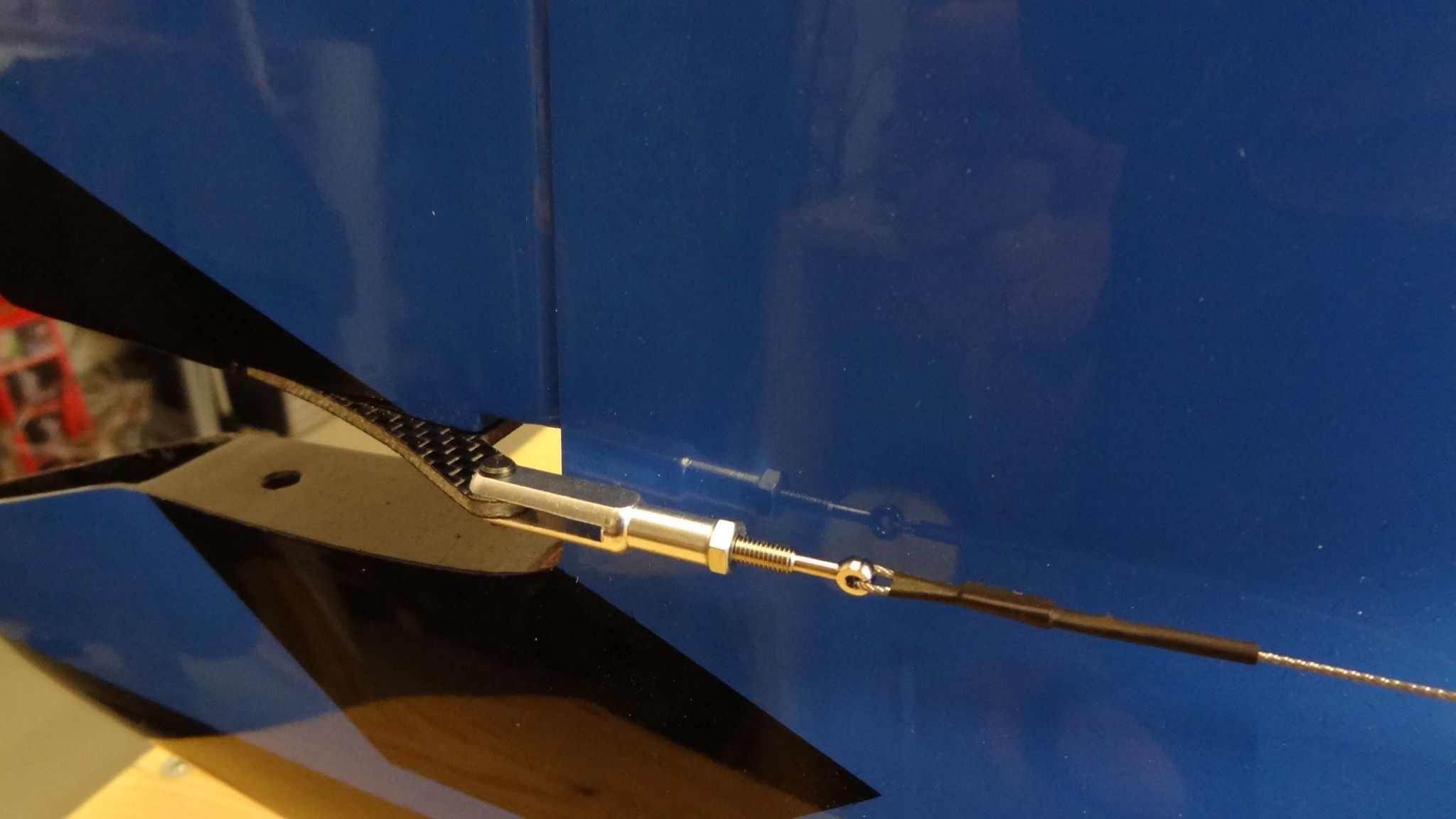
Das Seitenruderservo hab ich gemäss Anleitung im Rumpfrücken hinter der Kabinenhaube verbaut. Der Vorteil liegt darin, dass der Seilzug weniger mit der Höhenleitwerkanlenkung in die Quere kommt. Der Einbau ist jedoch etwas weniger gut zugänglich. Löcher für den Seilzug sind im Rumpf keine vorhanden, ich fräste somit feine Schlitze mit dem Dremel. Also Servohebel verwendete ich ein Doppel-Servoarm von Gabriel-Modelltechnik. Am Seitenruder verwendete ich MP-Jet Gabelköpfe.
 |
 |
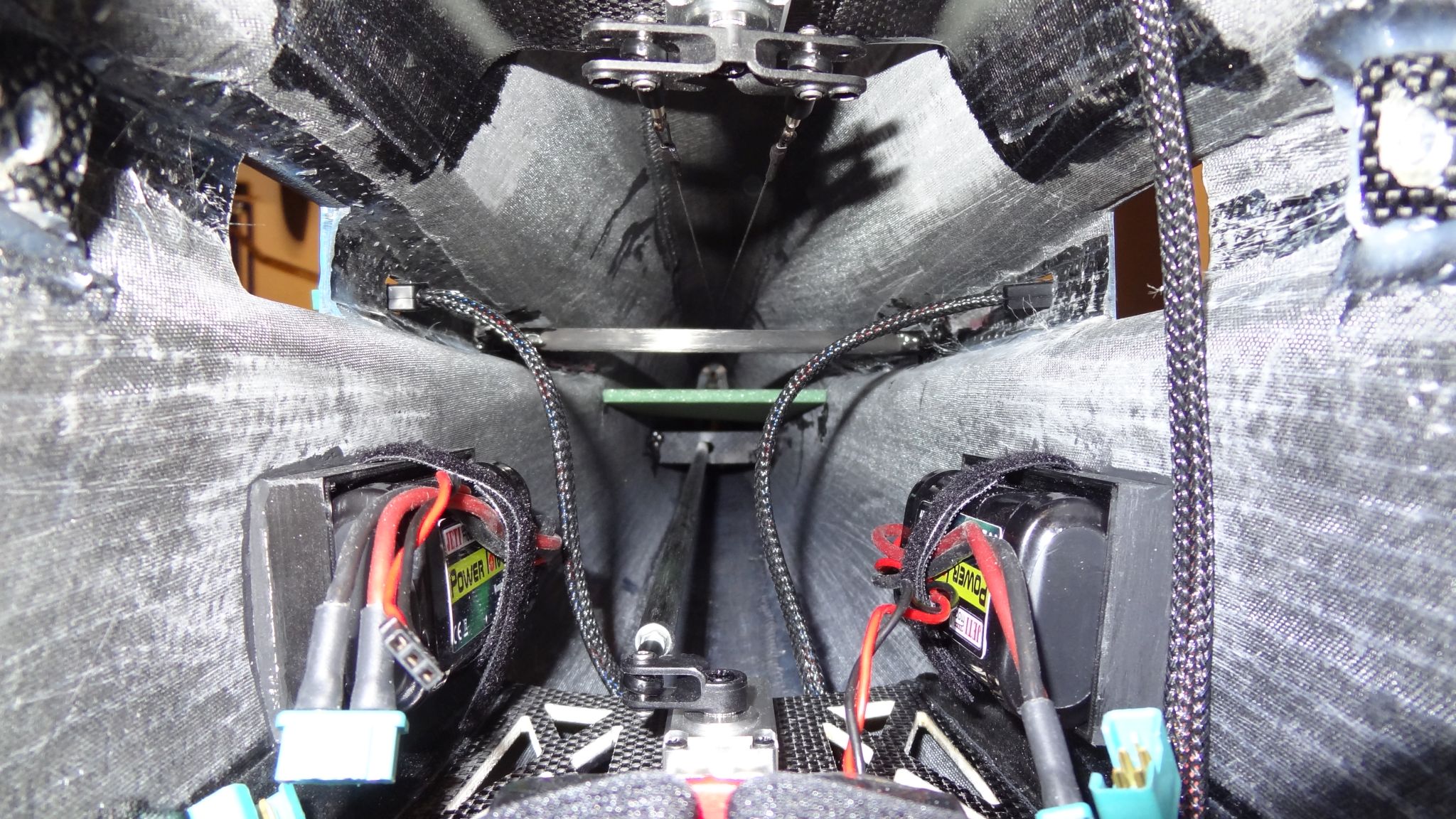
Das Servobrett ist etwa mit den selben Aussparungen versehen wie mit bei dem PS-Swift 2.8m, legt man dieses in den Rumpf kommt es reltiv tief zu liegen, aber das HLW Servo liegt nicht am Boden auf.
Gemäss Anleitung soll das Servobrett gemäss Gewicht des Antriebsakkus positioniert werden, um möglichst den Schwerpunkt ohne viel Blei zu erreichen. Ich befolgte diesen Ratschlag, als Resultat war jedoch dann die Schubstang etwas zu kurz und ich musste mir eine längere besorgen. Als weitere Unaufmerksamkeit von meiner Seite, lag dann die Kabinenhaube, welche beim PS-Swift 3.34 eine Sitzwanne aufweist, auf den Antriebsakku auf, da ich diese zuvor jeweils nur locker auf den Rumpf legte und nicht auf passte. Schlussendlich habe ich im Servobrett ein Ausschnitt erstellt und die Antriebsakkus tiefer gelegt.
Für das Höhenruder verwendete ich ein 14mm Gabriel-Modelltechnik Doppelservohebel und ebenfalls ein KST BLS915.
Wie beim PS-Swift 2.8m entschloss ich mich schlussendlich auch einen horizontalen Spant in die Rumpfröhre zu bauen, obwohl diese beim 3.34 Swift wesentlich druckfester ist, wenn man sie seitlich drückt. Der Spant fertigte ich aus 5mm Airex an und wiegt ca. 21g, was keinen wesentlichen Einfluss auf das Gesamtgewicht hat. Ich klebe den Spant "nur" mit Uhu Por ein.
 |
 |
Den Schwerpunkt von 98mm erreichte ich mit den 2x4500mah Fullymax 45c Akku ohne Blei, die Akkus liegen dabei relativ weit hinten. Somit ergab sich ein Gesamtgewicht von über 8kg, genau 8230g.
Im Schwerpunkt verbaute ich zustätzlich zwei 2S2600mAh PowerIonen von Jeti, somit bleibt der Schwerpunkt gleich und ich erreiche den Schwerpunkt von 98mm weiterhin, das Gewicht liegt dann bei 8437g.
| |
|
|
Flug (Frühling 2025)
Der Motortest zeigte mit Akku auf Lagerspannung 88A an bei 8S ca. 2.6kW ergibt, was ordentlich Schub produzierte. Ich bin jedoch gespannt, ob dann die 16x10 auch für die 8437g reicht für Handstart.
Für den Erstflug wählte ich jedoch Handstart am Hang ohne Motor, gewölbt in der Thermik-Flugphase startete mir ein Modellflugkollege den Swift. Der Wind war relativ stark und so sackte der Swift am Hang kaum durch. Ich musste in der Thermik-Flugphase nichts trimmen und der Swift zog wunderbar gerade aus, wie auf Schienen und lag extrem präzise an den Ruder und gewann im Hangwind an Höhe. Es gab sogar etwas Thermik und so konnte ich etwas überhöhen, das Gefühl am Knüppel passte, obwohl es sicher noch Zeit benötigt um mehr Vertrauen zu gewinnen. Aus kaum 100m Meter zog ich denn den Swift bereits einmal etwas schneller der Hangkante entlang mit einer anschliessenden Rolle, pooh die Rolle kam extrem gut, zackig und wie an der Schnurr gezogen. Ich hatte das Gefühl das sie etwas weniger Energie rauben als beim kleinen PS-Swift 2.8 welcher ebenfalls extreme Ausschläge hat. Vierpunkte Rollen mit eher wenig Speed klappten auch bereits sehr gut.
Ich wollte dann wissen wie die Motorleistung ist, am Anfang werden um die 100A als Spitze gezogen und der Strom pendelt sich dann bei 86A ein. Die Drehzahl hörte sich eher hoch an. Innert 16sec. stieg ich 180m.
Den Schwerpunkt vergass ich explizit durch anstechen zu prüfen, er fühlte sich eigentlich gleich gut an. In dieser sicheren Höhe testete ich das Butterfly, der Swift stellt sich gemäss den Ruderauschlägen von PS-Models nicht auf und bremste gut, er nahm die Nase eher etwas runter. Aus 220m kam ich dann einmal angerauscht, was 200km/h ergab per GPS-Messung. Im Looping zeigte der Swift dann schön die Energie welche in ihm steckt und zog extrem schön hoch. Die Speedstellung und SnapFlap hatte ich dazu noch gar nicht verwendet. Nach 45min beendet ich dan den Erstflug, es war sehr kalt an diesem Tag. Die Landung gelang sehr gut, mit Butterfly senkte der Swift die Nase und ich musste dann etwas ziehen. Ich bin echt gespannt, wie sich der Antrieb bei weiteren Tests bewähren wird und den Swift dann einmal zu fliegen wenn die Luft brennt.